搜索到
31
篇与
的结果
-
 STM32 - 定时器的设定 - 基础- 07 - 6-step PWM generation - 6步长PWM的产生 - COM Event的解释 前言:本节主要讲互补输出的步长设定问题,同时引入了一个重要的参数COM,这个再诸多STM32的手册里面都过于分散,在本文有一个比较完备的小结: When complementary outputs are used on a channel, preload bits are available on the OCxM, CCxE and CCxNE bits.互补输出主要由以下三个可以预设的设定决定:1 OC1M,OC1通道的输出模式,首先有OC1REF的模式决定,OC1REF会接到OC1 、OC1N然后,在OC1这里进行第二次设置,这里的设置又包括比较复杂的一组设定,有一个表:COM:(COM COMMUTATION交换 EVENT)or (Capture/Compare control update)COM的引入:提到COM之前,我们先看:定时器的控制寄存器2,里面的CCPC,CCUS控制位TIM1 and TIM8 control register 2 (TIMx_CR2)这里控制寄存器的CCPC位,决定了CCP 的 Preloaded的使能,这里定义了COM的2种出现的形式:(COMG bit set or rising edge detected on TRGI, depending on the CCUS bit).而CCUS里面的定义,则是对上述使能做更新的选择:事件产生寄存器TIM1 and TIM8 event generation register (TIMx_EGR)也就是COMGBit 5 COMG: Capture/Compare control update generation1: When CCPC bit is set, it allows to update CCxE, CCxNE and OCxM bitsCCPC预设值使能后,COM的相关使能位可以通过预设先设定好,而这三个通道恰恰就是决定了互补的输出波形,这些预设值在COM的EVENT的时候给到实际的shadow寄存器。The preload bits are transferred to the shadow bits at the COM commutation event. The user can thus program in advance (提前预设)the configuration for the next step and change the configuration of all the channels at the same time.COM can be generated by software by setting the COM bit in the TIMx_EGR register or by hardware (on TRGI rising edge).COM 的EVENT设定值可以是软件设定TIMx_EGR来实现,也可以 由硬件上升沿触发决定。EVENT发生的时候,会更新状态寄存器A flag is set when the COM event occurs (COMIF bit in the TIMx_SR register),Bit 5 COMIF: COM interrupt flagThis flag is set by hardware on COM event (when Capture/compare Control bits - CCxE, CCxNE, OCxM - have been updated). It is cleared by software.0: No COM event occurred.1: COM interrupt pending. 同时也可以产生中断:which can generate an interrupt (if the COMIE bit is set in the TIMx_DIER register) or a DMA request(if the COMDE bit is set in the TIMx_DIER register).Bit 5 COMIE: COM interrupt enable0: COM interrupt disabled1: COM interrupt enabledFigure 91 describes the behavior of the OCx and OCxN outputs when a COM event occurs,in 3 different examples of programmed configurations.Example 1:1 CO1M = 100 : OC1REF 为低电平 预设值2 CC1NE = 0, 那么 OCXN 的互补输出被关闭了3 CC1E = 1,OC1 的输出依据OCXREF的输出,再结合MIX的Table组合:当COM = 1 ,也就是,TIMx_EGR 的 COMG 更新的时候COM EVENT 事件产生,同时更新设置,那么OC1REF force low,OC1的输出被拉倒低电平Example 2:和例子1不同的是,CC1NE的值设为1,这样互补通道打开,同时OC1M设为1,那么OC1REF 被Force to High 给到OC1如果之前OC1REF就是高,那么他是不变的,互补输出通道则由原来的LOW改为和OC1REF一致为高,所有的这些变动,都是在COM TO 1的时候生效,这个和SAMPLE1 一致,仔细看这个例子,前面互补输出的通道都是正常的,到COM TO 1 触发之后,OC1N的通道就一直未低电平了,DISABLE。该例子给出了OC1REF的两个互补波形,而且还带死区的Delay有道云笔记2021-11-16 15:30:49
STM32 - 定时器的设定 - 基础- 07 - 6-step PWM generation - 6步长PWM的产生 - COM Event的解释 前言:本节主要讲互补输出的步长设定问题,同时引入了一个重要的参数COM,这个再诸多STM32的手册里面都过于分散,在本文有一个比较完备的小结: When complementary outputs are used on a channel, preload bits are available on the OCxM, CCxE and CCxNE bits.互补输出主要由以下三个可以预设的设定决定:1 OC1M,OC1通道的输出模式,首先有OC1REF的模式决定,OC1REF会接到OC1 、OC1N然后,在OC1这里进行第二次设置,这里的设置又包括比较复杂的一组设定,有一个表:COM:(COM COMMUTATION交换 EVENT)or (Capture/Compare control update)COM的引入:提到COM之前,我们先看:定时器的控制寄存器2,里面的CCPC,CCUS控制位TIM1 and TIM8 control register 2 (TIMx_CR2)这里控制寄存器的CCPC位,决定了CCP 的 Preloaded的使能,这里定义了COM的2种出现的形式:(COMG bit set or rising edge detected on TRGI, depending on the CCUS bit).而CCUS里面的定义,则是对上述使能做更新的选择:事件产生寄存器TIM1 and TIM8 event generation register (TIMx_EGR)也就是COMGBit 5 COMG: Capture/Compare control update generation1: When CCPC bit is set, it allows to update CCxE, CCxNE and OCxM bitsCCPC预设值使能后,COM的相关使能位可以通过预设先设定好,而这三个通道恰恰就是决定了互补的输出波形,这些预设值在COM的EVENT的时候给到实际的shadow寄存器。The preload bits are transferred to the shadow bits at the COM commutation event. The user can thus program in advance (提前预设)the configuration for the next step and change the configuration of all the channels at the same time.COM can be generated by software by setting the COM bit in the TIMx_EGR register or by hardware (on TRGI rising edge).COM 的EVENT设定值可以是软件设定TIMx_EGR来实现,也可以 由硬件上升沿触发决定。EVENT发生的时候,会更新状态寄存器A flag is set when the COM event occurs (COMIF bit in the TIMx_SR register),Bit 5 COMIF: COM interrupt flagThis flag is set by hardware on COM event (when Capture/compare Control bits - CCxE, CCxNE, OCxM - have been updated). It is cleared by software.0: No COM event occurred.1: COM interrupt pending. 同时也可以产生中断:which can generate an interrupt (if the COMIE bit is set in the TIMx_DIER register) or a DMA request(if the COMDE bit is set in the TIMx_DIER register).Bit 5 COMIE: COM interrupt enable0: COM interrupt disabled1: COM interrupt enabledFigure 91 describes the behavior of the OCx and OCxN outputs when a COM event occurs,in 3 different examples of programmed configurations.Example 1:1 CO1M = 100 : OC1REF 为低电平 预设值2 CC1NE = 0, 那么 OCXN 的互补输出被关闭了3 CC1E = 1,OC1 的输出依据OCXREF的输出,再结合MIX的Table组合:当COM = 1 ,也就是,TIMx_EGR 的 COMG 更新的时候COM EVENT 事件产生,同时更新设置,那么OC1REF force low,OC1的输出被拉倒低电平Example 2:和例子1不同的是,CC1NE的值设为1,这样互补通道打开,同时OC1M设为1,那么OC1REF 被Force to High 给到OC1如果之前OC1REF就是高,那么他是不变的,互补输出通道则由原来的LOW改为和OC1REF一致为高,所有的这些变动,都是在COM TO 1的时候生效,这个和SAMPLE1 一致,仔细看这个例子,前面互补输出的通道都是正常的,到COM TO 1 触发之后,OC1N的通道就一直未低电平了,DISABLE。该例子给出了OC1REF的两个互补波形,而且还带死区的Delay有道云笔记2021-11-16 15:30:49 -
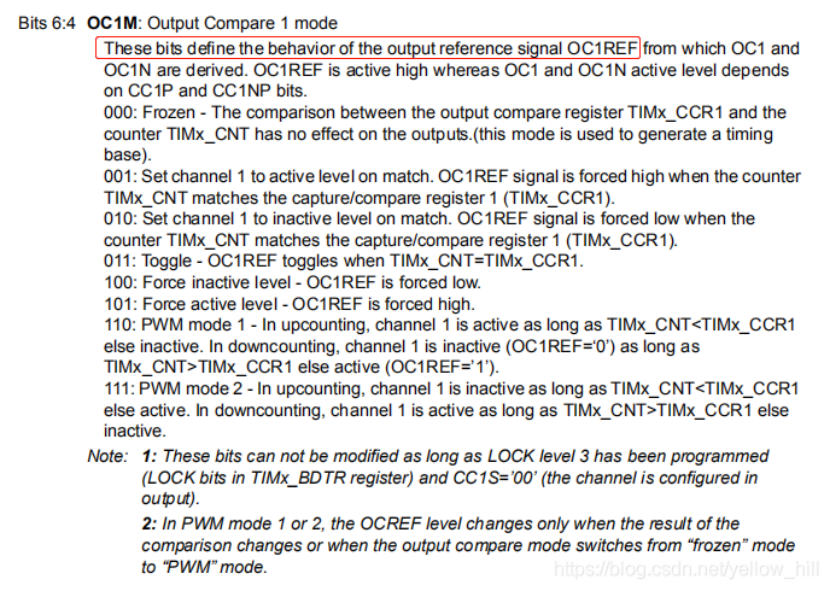
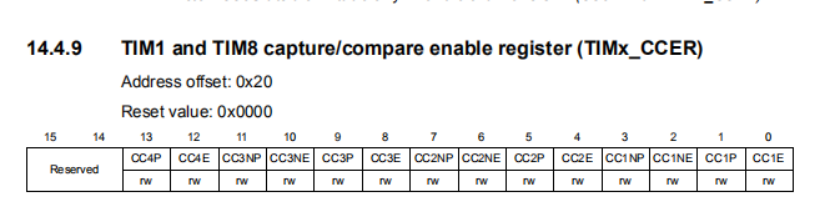
STM32 - 高级定时器的设定 - 基础-05 - 输出波形控制 The advanced-control timers (TIM1 and TIM8) can output two complementary(互补) signals and manage the switching-off and the switching-on instants of the outputs. This time is generally known as dead-time and it has to be adjust it depending on the devices connected to the outputs and their characteristics (intrinsic delays of level-shifters, delays due to power switches...)User can select the polarity of the outputs (main output OCx or complementary OCxN) independently for each output.This is done by writing to the CCxP and CCxNP bits in the TIMx_CCER register.TIMx_CCER 使能控制寄存器,控制CCxP 、CCxNP ,Bit 1 CC1P: Capture/Compare 1 output polarityCC1 channel configured as output:0: OC1 active high1: OC1 active lowBit 3 CC1NP: Capture/Compare 1 complementary output polarity0: OC1N active high.1: OC1N active low.The complementary signals OCx and OCxN are activated by a combination of several control bits:the CCxE and CCxNE bits in the TIMx_CCER registerOC/OCN输出使能控制Bit 0 CC1E: Capture/Compare 1 output enableCC1 channel configured as output:0: Off - OC1 is not active. OC1 level is then function of MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits.1: On - OC1 signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits.Bit 2 CC1NE: Capture/Compare 1 complementary output enable0: Off - OC1N is not active. OC1N level is then function of MOE, OSSI, OSSR, OIS1, OIS1N and CC1E bits.1: On - OC1N signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1E bits.and the MOE, OISx, OISxN, OSSI and OSSR bits in the TIMx_BDTR TIM1 and TIM8 break and dead-time register (TIMx_BDTR)Bit 15 MOE: Main output enableThis bit is cleared asynchronously by hardware as soon as the break input is active. It is set by software or automatically depending on the AOE bit. It is acting only on the channels which are configured in output.0: OC and OCN outputs are disabled or forced to idle state.1: OC and OCN outputs are enabled if their respective enable bits are set (CCxE, CCxNE in TIMx_CCER register).See OC/OCN enable description for more details (Section 14.4.9: TIM1 and TIM8 capture/compare enable register (TIMx_CCER)).Bit 11 OSSR: Off-state selection for Run modeThis bit is used when MOE=1 on channels having a complementary output which are configured as outputs. OSSR is not implemented if no complementary output is implemented in the timer.See OC/OCN enable description for more details (Section 14.4.9: TIM1 and TIM8 capture/compare enable register (TIMx_CCER)).0: When inactive, OC/OCN outputs are disabled (OC/OCN enable output signal=0).1: When inactive, OC/OCN outputs are enabled with their inactive level as soon as CCxE=1or CCxNE=1. Then, OC/OCN enable output signal=1Bit 10 OSSI: Off-state selection for Idle modeThis bit is used when MOE=0 on channels configured as outputs.See OC/OCN enable description for more details (Section 14.4.9: TIM1 and TIM8 capture/compare enable register (TIMx_CCER)).0: When inactive, OC/OCN outputs are disabled (OC/OCN enable output signal=0).1: When inactive, OC/OCN outputs are forced first with their idle level as soon as CCxE=1 or CCxNE=1. OC/OCN enable output signal=1)Bits 7:0 DTG[7:0]: Dead-time generator setupThis bit-field defines the duration of the dead-time inserted between the complementary outputs. DT correspond to this duration.DTG[7:5]=0xx => DT=DTG[7:0]x tdtg with tdtg=tDTS.DTG[7:5]=10x => DT=(64+DTG[5:0])xtdtg with Tdtg=2xtDTS.DTG[7:5]=110 => DT=(32+DTG[4:0])xtdtg with Tdtg=8xtDTS.DTG[7:5]=111 => DT=(32+DTG[4:0])xtdtg with Tdtg=16xtDTS.Example if TDTS=125ns (8MHz), dead-time possible values are:0 to 15875 ns by 125 ns steps,16 us to 31750 ns by 250 ns steps,32 us to 63us by 1 us steps,64 us to 126 us by 2 us stepsand TIMx_CR2 registers.for more details. In particular, the dead-time is activated when switching to the IDLE state (MOE falling down to 0). Dead-time insertion is enabled by setting both CCxE and CCxNE bits, and the MOE bit if the break circuit is present. DTG[7:0] bits of the TIMx_BDTR register are used to control the dead-time generation for all channels.From a reference waveform OCxREF, it generates 2 outputs OCx and OCxN. If OCx and OCxN are active high:• The OCx output signal is the same as the reference signal except for the rising edge, which is delayed relative to the reference rising edge.(见下面分析)• The OCxN output signal is the opposite of the reference signal except for the rising edge, which is delayed relative to the reference falling edge.(见下面分析)If the delay is greater than the width of the active output (OCx or OCxN) then the corresponding pulse is not generated.The following figures show the relationships between the output signals of the dead-time generator and the reference signal OCxREF. (we suppose CCxP=0, CCxNP=0, MOE=1, CCxE=1 and CCxNE=1 in these examples)CC1P=0 ----> 0: OC1 active high CC1NP =0 ----> : 0: OC1N active high.MOE=1 ----> 1: OC and OCN outputs are enabledCCxE=1 ----> 1: On - OC1 signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1NE bits.CCxNE=1 ----> 1: On - OC1N signal is output on the corresponding output pin depending on MOE, OSSI, OSSR, OIS1, OIS1N and CC1E bits.笔者案:我们现在依据上面的这个例子来分析一下:• The OCx output signal is the same as the reference signal except for the rising edge, which is delayed relative to the reference rising edge首先看OCX的输出,他应该是完全和OCXREF的输出一致,除了,上升沿会增加死区延时:蓝色为相同部分,后面上升沿往后移动了一格设定的delay时间。• The OCxN output signal is the opposite of the reference signal except for the rising edge, which is delayed relative to the reference falling edge.(见下面分析)The dead-time delay is the same for each of the channels and is programmable with the DTG bits in the TIMx_BDTR register.delay的时间通过DTG来控制。Re-directing OCxREF to OCx or OCxNIn output mode (forced, output compare or PWM), OCxREF can be re-directed to the OCx output or to OCxN output by configuring the CCxE and CCxNE bits in the TIMx_CCER register.将输出的OCXREF的波形可以转接到OCX 等其他端口,This allows the user to send a specific waveform (such as PWM or static active level) on one output while the complementary remains at its inactive level. Other possibilities are to have both outputs at inactive level or both outputs active and complementary with dead-time.Note: When only OCxN is enabled (CCxE=0, CCxNE=1), it is not complemented and becomes active as soon as OCxREF is high. For example, if CCxNP=0 then OCxN=OCxRef. On the other hand, when both OCx and OCxN are enabled CCxE=CCxNE=1) OCx becomes active when OCxREF is high whereas OCxN is complemented and becomes active whenOCxREF is low.有道云笔记2021-11-15 19:29:53
-
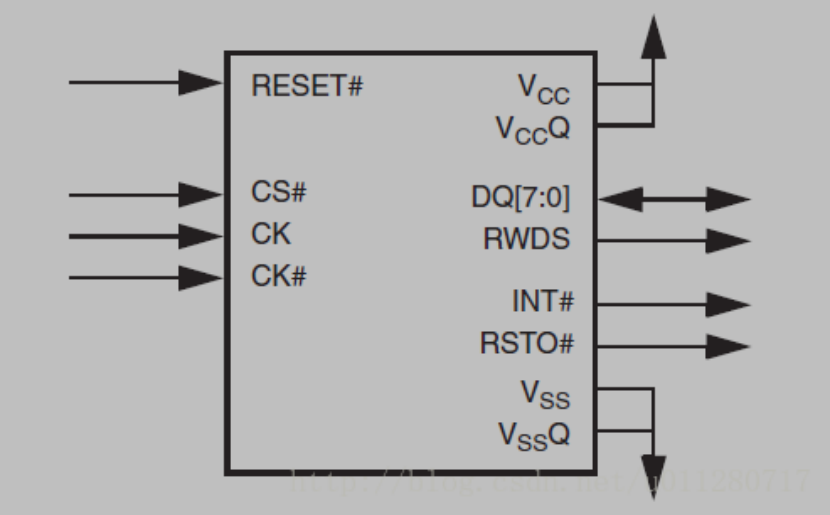
HyperBus Nor Flash小记 InterfaceMandatory I/O SummaryOptional I/O SummaryProtocal当HyperBus处于Idle状态(CK=Low & CK#=High)时,CS#从High变成Low,hyperbus的传输开始进行。最前面的三个时钟周期传输3个word的Command/Address(CA0, CA1, CA2),这三个word的CA用来决定这个传输一些特性。PS:这里面的word是2个byte,就是16bit。一个时钟周期是指两个clock,至于为什么这样定,我也不知道,Hyperbus的specification就是这么定的所以3个word的CA信息一共是48个bit。当传输完CA信息后,bus上需要传输一些dummy clock初始化RWDS信号。RWDS就是CK加了一些延迟的信号,用作高速读操作时的DQS。当数据传输开始,读数据是在RWDS的边沿进行采样,写数据是在Single-ended clock(即3.0V的CK)的边沿采样,或者在Differential clock(即1.8V CK和CK#)模式下,在CK和CK#交叉点进行数据采样。一旦完成数据传输,host就可以把CS#拉高并且把clock置为IDLE状态。当clock已经是IDLE状态了,拉嘎CS#就能结束一次传输。读时序下面贴出一个实际的读数据的时序, 读数据的地址是0x400。CA[48:0] = 0xA000004000。其中CA[47] = 1代表读,CA[46] = 0, CA[45] =1代表linear burst,ROW & Upper Column Address = 0x0000040 = 0x400 / 0x10, Lower Column Address=0x0 = 0x400 % 0x10。在插入了一些dummy的时钟周期后,进行了数据的采集。其中, 插入在CA和数据之间的dummy clock的个数是随设备不同而不同的,同时也跟Hyperbus的采样频率有关,这个需要参考不同的Hyberbus设备的手册才能知道。写时序写时序分为Write Transactions with Initial Latency和Write Transactions without Initial Latency。由于我并没有涉及太多的写设备的工作,所以这里就不多讲了。有Initial Latency的时序跟读时序差不多,只不过需要注意的是采样的时钟并不是RWDS即DQS,而是CK和CK#。而没有Initial Latency的就更简单了,直接数据就跟在CA后面,下面贴出官方Specification的是时序图。有道云笔记2021-11-08 11:34:45
-
Vscode自动生成verilog例化 前言veirlog模块例化的时候,辣么多的信号端子,手动例化又慢又容易出错,葵花妈妈开课啦,孩子手残老犯错怎么办?当然是脚本一劳永逸,妈妈再也不担心手残党。流程(1)在vscode中安装如下插件。(2)在电脑中安装python3以上的环境。下载地址:https://www.python.org/downloads/release/python-373/安装记得一定要勾选添加路径,记得管理员安装。重启你的电脑。在cmd窗口输入python即可验证是否安装成功!(3)安装chardet。为确保插件可用,这个需要安装。参考链接:https://blog.csdn.net/sinat_28631741/article/details/80483064方式一 源码按照: 第一步:下载压缩文件,例如: 'chardet-3.0.4.tar.gz'; 第二步:解压文件到python安装位置下的‘site-packages’目录下,例如:‘D:\python2.7\Lib\site-packages’; 第三步:打开终端命令窗口,进入解压的‘chardet’目录下,执行命令:python setup.py install (4)修改插件的原始py文件,觉得开发者的py有瑕疵,让帅气的同事重新整了个,把以下代码替换进原始py文件即可。在打开v文件的vscode下按ctrl+p,输入instance可出现下述界面。替换此py文件的代码即可。#! /usr/bin/env python ''' vTbgenerator.py -- generate verilog module Testbench generated bench file like this: fifo_sc #( .DATA_WIDTH ( 8 ), .ADDR_WIDTH ( 8 ) ) u_fifo_sc ( .CLK ( CLK ), .RST_N ( RST_N ), .RD_EN ( RD_EN ), .WR_EN ( WR_EN ), .DIN ( DIN [DATA_WIDTH-1 :0] ), .DOUT ( DOUT [DATA_WIDTH-1 :0] ), .EMPTY ( EMPTY ), .FULL ( FULL ) ); Usage: python vTbgenerator.py ModuleFileName.v ''' import random import re import sys from queue import Queue import chardet def delComment(Text): """ removed comment """ single_line_comment = re.compile(r"//(.*)$", re.MULTILINE) multi_line_comment = re.compile(r"/\*(.*?)\*/", re.DOTALL) Text = multi_line_comment.sub('\n', Text) Text = single_line_comment.sub('\n', Text) return Text def delBlock(Text): """ removed task and function block """ Text = re.sub(r'\Wtask\W[\W\w]*?\Wendtask\W', '\n', Text) Text = re.sub(r'\Wfunction\W[\W\w]*?\Wendfunction\W', '\n', Text) return Text def findName(inText): """ find module name and port list""" p = re.search(r'([a-zA-Z_][a-zA-Z_0-9]*)\s*', inText) mo_Name = p.group(0).strip() return mo_Name def paraDeclare(inText, portArr): """ find parameter declare """ pat = r'\s' + portArr + r'\s[\w\W]*?[;,)]' ParaList = re.findall(pat, inText) return ParaList def portDeclare(inText, portArr): """find port declare, Syntax: input [ net_type ] [ signed ] [ range ] list_of_port_identifiers return list as : (port, [range]) """ port_definition = re.compile( r'\b' + portArr + r''' (\s+(wire|reg|logic|interface)\s+)* (\s*signed\s+)* (\s*\[.*?:.*?\]\s*)* (?P<port_list>.*?) (?= \binput\b | \boutput\b | \binout\b | ; | \) ) ''', re.VERBOSE | re.MULTILINE | re.DOTALL ) pList = port_definition.findall(inText) t = [] for ls in pList: if len(ls) >= 2: t = t + portDic(ls[-2:]) return t def portDic(port): """delet as : input a =c &d; return list as : (port, [range]) """ pRe = re.compile(r'(.*?)\s*=.*', re.DOTALL) pRange = port[0] pList = port[1].split(',') pList = [i.strip() for i in pList if i.strip() != ''] pList = [(pRe.sub(r'\1', p), pRange.strip()) for p in pList] return pList def formatPort(AllPortList, isPortRange=1): PortList = AllPortList str = '' if PortList != []: l1 = max([len(i[0]) for i in PortList])+2 l3 = max(18, l1) strList = [] str = ',\n'.join([' ' * 4 + '.' + i[0].ljust(l3) + '(' + (i[0]) + ')' for i in AllPortList]) strList = strList + [str] str = ',\n\n'.join(strList) return str def formatDeclare(PortList, portArr, initial=""): str = '' if PortList != []: str = '\n'.join([portArr.ljust(4) + ' '+(i[1]+min(len(i[1]), 1)*' ' + i[0]) + ';' for i in PortList]) return str def formatPara(ParaList): paraDec = '' paraDef = '' if ParaList != []: s = '\n'.join(ParaList) pat = r'([a-zA-Z_][a-zA-Z_0-9]*)\s*=\s*([\w\W]*?)\s*[;,)]' p = re.findall(pat, s) l1 = max([len(i[0]) for i in p]) l2 = max([len(i[1]) for i in p]) paraDec = '\n'.join(['parameter %s = %s;' % (i[0].ljust(l1 + 1), i[1].ljust(l2)) for i in p]) paraDef = '#(\n' + ',\n'.join([' .' + i[0].ljust(l1 + 1) + '( ' + i[1].ljust(l2)+' )' for i in p]) + ')\n' return paraDec, paraDef def portT(inText, ioPadAttr): x = {} count_list = [] order_list = [] for i in ioPadAttr: p = port_index_list(inText, i) for j in p: count_list.append(j) x[j] = i count_list = quick_sort(count_list, 0, len(count_list)-1) for c in count_list: order_list.append(x.get(c)) return order_list def quick_sort(myList, start, end): if start < end: i, j = start, end base = myList[i] while i < j: while (i < j) and (myList[j] >= base): j = j - 1 myList[i] = myList[j] while (i < j) and (myList[i] <= base): i = i + 1 myList[j] = myList[i] myList[i] = base quick_sort(myList, start, i - 1) quick_sort(myList, j + 1, end) return myList def formatPort_order(padAttr, orderList): for p in padAttr: q = Queue() for i in padAttr.get(p): q.put(i) padAttr[p] = q AllPortList = [] for o in orderList: AllPortList.append(padAttr.get(o).get()) return AllPortList def port_index_list(intext, text): l = [] t = intext index = t.find(text) while index > -1: t = t.replace(text, random_str(len(text)), 1) l.append(index) index = t.find(text) return l def random_str(size): s = '' for i in range(size): s += str(random.randint(0, 9)) return s def getPortMap(AllPortList, ioPadAttr): if len(AllPortList) != len(ioPadAttr): return p_map = {} for i in range(len(AllPortList)): p_map[ioPadAttr[i]] = AllPortList[i] return p_map def writeTestBench(input_file): """ write testbench to file """ with open(input_file, 'rb') as f: f_info = chardet.detect(f.read()) f_encoding = f_info['encoding'] with open(input_file, encoding=f_encoding) as inFile: inText = inFile.read() # removed comment,task,function inText = delComment(inText) inText = delBlock(inText) # moduel ... endmodule # moPos_begin = re.search(r'(\b|^)module\b', inText).end() moPos_end = re.search(r'\bendmodule\b', inText).start() inText = inText[moPos_begin:moPos_end] name = findName(inText) paraList = paraDeclare(inText, 'parameter') paraDec, paraDef = formatPara(paraList) ioPadAttr = ['input', 'output', 'inout','interface'] orlder = portT(inText, ioPadAttr) input = portDeclare(inText, ioPadAttr[0]) output = portDeclare(inText, ioPadAttr[1]) inout = portDeclare(inText, ioPadAttr[2]) interface = portDeclare(inText, ioPadAttr[3]) portList = formatPort(formatPort_order( getPortMap([input, output, inout,interface], ioPadAttr), orlder)) input = formatDeclare(input, 'reg') output = formatDeclare(output, 'wire') inout = formatDeclare(inout, 'wire') interface = formatDeclare(interface, 'wire') # write Instance # module_parameter_port_list if(paraDec != ''): print("// %s Parameters\n%s\n" % (name, paraDec)) # list_of_port_declarations #print("// %s Inputs\n%s\n" % (name, input)) #print("// %s Outputs\n%s\n" % (name, output)) #if(inout != ''): # print("// %s Bidirs\n%s\n" % (name, inout)) print("\n") # UUT print("%s %s inst_%s (\n%s\n);" % (name, paraDef, name, portList)) if __name__ == '__main__': writeTestBench(sys.argv[1])(5)享受一下吧。比如我们有如下代码:crtl+p,输入instance,按回车即可。 复制粘贴大发好。以上。转载于:https://www.cnblogs.com/kingstacker/p/9944259.html有道云笔记2021-11-02 11:37:58
-
STM32之霍尔传感器模块 一、简介本文介绍如何在STM32上使用霍尔传感器模块。二、实验平台库版本:STM32F10x_StdPeriph_Lib_V3.5.0编译软件:MDK4.53硬件平台:STM32开发板(主芯片stm32f103c8t6)仿真器:JLINK三、版权声明博主:甜甜的大香瓜声明:喝水不忘挖井人,转载请注明出处。原文地址:http://blog.csdn.NET/feilusia联系方式:897503845@qq.com香瓜BLE之CC2541群:127442605香瓜BLE之CC2640群:557278427香瓜BLE之Android群:541462902香瓜单片机之STM8/STM32群:164311667甜甜的大香瓜的小店(淘宝店):https://shop217632629.taobao.com/?spm=2013.1.1000126.d21.hd2o8i四、实验前提1、在进行本文步骤前,请先阅读以下博文:暂无2、在进行本文步骤前,请先 实现以下博文:暂无五、基础知识1、霍尔传感器是什么?答:霍尔传感器是根据霍尔效应制作的一种磁场传感器。用磁铁去靠近霍尔传感器时,霍尔传感器的引脚电平会产生变化。2、霍尔传感器主要用在什么地方?答:霍尔传感器可测速、计数、限位上。举例限位功能:两个霍尔传感器形成45°的夹角,电机边缘粘着一个磁铁,一旦电机转动导致磁铁触发任意其中一个霍尔传感器,则STM32检测到触发后立刻停止电机,不能再继续往此方向转动。以此达到限制电机转动角度的作用。3、本文使用的是什么霍尔传感器模块?答:香瓜买的霍尔传感器模块一共有四个引脚,GND、VCC、D0、A0。其中只需要用到三根线,GND、VCC、D0。(A0不知做啥用的,计数?)使用方法:1)5V供电。2)用跳线连接D0和STM32的IO口(本文连接的是PA11)。3)D0默认是高电平,但磁铁的特定一面(磁铁另一面无用)去靠近霍尔传感器模块时,D0会被拉低。4、霍尔传感器与限位开关有什么区别?答:1)限位开关①优点:无功耗。②缺点:易损坏。2)霍尔传感器①优点:不易损坏。②缺点:有功耗。六、实验步骤1、编写并添加霍尔传感器驱动1)编写驱动GUA_Hall_Sensor.c(存放在“……\HARDWARE”) //****************************************************************************** //name: GUA_Hall_Sensor.c //introduce: 霍尔传感器驱动 //author: 甜甜的大香瓜 //email: 897503845@qq.com //QQ group 香瓜单片机之STM8/STM32(164311667) //changetime: 2017.03.06 //****************************************************************************** #include"stm32f10x.h" #include"GUA_Hall_Sensor.h" /*********************宏定义************************/ //霍尔传感器引脚 #define GUA_HALL_SENSOR_PORT GPIOA #define GUA_HALL_SENSOR_PIN GPIO_Pin_11 //消抖总次数 #define GUA_HALL_SENSOR_DISAPPERAS_SHAKS_COUNT 500000 /*********************内部变量************************/ static GUA_U32 sGUA_Hall_Sensor_DisapperasShakes_IdleCount = 0; //消抖时的空闲状态计数值 static GUA_U32 sGUA_Hall_Sensor_DisapperasShakes_TriggerCount = 0; //消抖时的触发状态计数值 /*********************内部函数************************/ staticvoidGUA_Hall_Sensor_IO_Init(void); //****************************************************************************** //name: GUA_Hall_Sensor_IO_Init //introduce: 霍尔传感器的IO初始化 //parameter: none //return: none //author: 甜甜的大香瓜 //email: 897503845@qq.com //QQ group 香瓜单片机之STM8/STM32(164311667) //changetime: 2017.03.06 //****************************************************************************** staticvoidGUA_Hall_Sensor_IO_Init(void) { //IO结构体 GPIO_InitTypeDef GPIO_InitStructure; //时钟使能 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //霍尔IO配置 GPIO_InitStructure.GPIO_Pin = GUA_HALL_SENSOR_PIN; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_Init(GUA_HALL_SENSOR_PORT, &GPIO_InitStructure); } //****************************************************************************** //name: GUA_Hall_Sensor_Check_Pin //introduce: 霍尔传感器检测触发状态 //parameter: none //return: GUA_HALL_SENSOR_STATUS_IDLE or GUA_HALL_SENSOR_STATUS_TRIGGER //author: 甜甜的大香瓜 //email: 897503845@qq.com //QQ group 香瓜单片机之STM8/STM32(164311667) //changetime: 2017.03.06 //****************************************************************************** GUA_U8 GUA_Hall_Sensor_Check_Pin(void) { //没触发 if(GPIO_ReadInputDataBit(GUA_HALL_SENSOR_PORT, GUA_HALL_SENSOR_PIN) == SET) { //计数 sGUA_Hall_Sensor_DisapperasShakes_IdleCount++; sGUA_Hall_Sensor_DisapperasShakes_TriggerCount = 0; //判断计数是否足够 if(sGUA_Hall_Sensor_DisapperasShakes_IdleCount >= GUA_HALL_SENSOR_DISAPPERAS_SHAKS_COUNT) { return GUA_HALL_SENSOR_STATUS_IDLE; } } //触发 else { //计数 sGUA_Hall_Sensor_DisapperasShakes_IdleCount = 0; sGUA_Hall_Sensor_DisapperasShakes_TriggerCount++; //判断计数是否足够 if(sGUA_Hall_Sensor_DisapperasShakes_TriggerCount >= GUA_HALL_SENSOR_DISAPPERAS_SHAKS_COUNT) { return GUA_HALL_SENSOR_STATUS_TRIGGER; } } return GUA_HALL_SENSOR_STATUS_DISAPPERAS_SHAKS; } //****************************************************************************** //name: GUA_Limit_Switch_Init //introduce: 霍尔传感器初始化 //parameter: none //return: none //author: 甜甜的大香瓜 //email: 897503845@qq.com //QQ group 香瓜单片机之STM8/STM32(164311667) //changetime: 2017.03.06 //****************************************************************************** voidGUA_Hall_Sensor_Init(void) { //初始化IO GUA_Hall_Sensor_IO_Init(); } 2)编写驱动头文件GUA_Hall_Sensor.h(存放在“……\HARDWARE”) //****************************************************************************** //name: GUA_Hall_Sensor.h //introduce: 霍尔传感器驱动的头文件 //author: 甜甜的大香瓜 //email: 897503845@qq.com //QQ group 香瓜单片机之STM8/STM32(164311667) //changetime: 2017.03.06 //****************************************************************************** #ifndef _GUA_HALL_SENSOR_H_ #define _GUA_HALL_SENSOR_H_ /*********************宏定义************************/ //类型宏 #ifndef GUA_U8 typedefunsignedchar GUA_U8; #endif #ifndef GUA_8 typedefsignedchar GUA_8; #endif #ifndef GUA_U16 typedefunsignedshort GUA_U16; #endif #ifndef GUA_16 typedefsignedshort GUA_16; #endif #ifndef GUA_U32 typedefunsignedlong GUA_U32; #endif #ifndef GUA_32 typedefsignedlong GUA_32; #endif #ifndef GUA_U64 typedefunsignedlonglong GUA_U64; #endif #ifndef GUA_64 typedefsignedlonglong GUA_64; #endif //霍尔传感器的触发状态 #define GUA_HALL_SENSOR_STATUS_TRIGGER 0 //霍尔传感器触发 #define GUA_HALL_SENSOR_STATUS_IDLE 1 //霍尔传感器没触发 #define GUA_HALL_SENSOR_STATUS_DISAPPERAS_SHAKS 2 //霍尔传感器消抖中 /*********************外部函数声明************************/ GUA_U8 GUA_Hall_Sensor_Check_Pin(void); voidGUA_Hall_Sensor_Init(void); #endif 3)工程中添加GUA_Hall_Sensor.c4)在MDK设置中添加串口驱动源文件路径2、在应用层中调用1)添加驱动头文件(main.c中)#include"GUA_Hall_Sensor.h"2)添加驱动初始化代码(main.c的main函数中)//霍尔传感器初始化GUA_Hall_Sensor_Init(); 3)添加测试代码①写测试代码(main.c中) staticvoidGUA_Test(void) { U8 nGUA_Ret = 0; U8 nGUA_Stop = 0; while(1) { //检测霍尔当前状态 nGUA_Ret = GUA_Hall_Sensor_Check_Pin(); //检测到霍尔被触发 if(nGUA_Ret == GUA_HALL_SENSOR_STATUS_TRIGGER) { nGUA_Stop = 1; } } ②调用测试代码(main.c的main函数中)//测试代码GUA_Test();七、注意事项暂无。八、实验结果仿真并设置断点在测试代码的“nGUA_Stop = 1;”中,全速运行。用磁铁去靠近模块上的霍尔传感器芯片,模块上的led被点亮表示触发,同时工程中消抖之后会停止在断点处,表示检测到PA11处的霍尔传感器触发导致的低电平。如下图因此实验成功。有道云笔记2021-11-16 17:25:02